






















ผลิตภัณฑ์ทั้งหมด
-
ไมโครสเต็ปเปอร์มอเตอร์
-
มอเตอร์สเต็ปเปอร์แม่เหล็กถาวร
-
มอเตอร์สเต็ปเปอร์
-
Linear Stepper เครื่องยนต์
-
มอเตอร์สไลเดอร์
-
มอเตอร์ไฮบริดสเต็ป
-
มอเตอร์เกียร์ DC ขนาดเล็ก
-
ROV Thruster เครื่องยนต์s
-
Gearเครื่องยนต์ โลหะขนาดเล็ก
-
กล่องเกียร์ขนาดเล็ก
-
การควบคุมตำแหน่งสเต็ปเปอร์มอเตอร์
-
เครื่องพิมพ์ 3D Stepper เครื่องยนต์
-
Stepper ขับมอเตอร์
-
ตัวควบคุมมอเตอร์กระแสตรง
-
สกรูและน็อต
-
 แอนเดรสบลังโกทรัสเตอร์มาถึงอย่างถูกต้องแล้ว ฉันทดสอบพวกเขาใน ROV และเรามีความสุขมากกับผลลัพธ์ การตกแต่งภายในของ epoxy นั้นดีมากและพลังของมอเตอร์เมื่อเทียบกับขนาดนั้นค่อนข้างดี
แอนเดรสบลังโกทรัสเตอร์มาถึงอย่างถูกต้องแล้ว ฉันทดสอบพวกเขาใน ROV และเรามีความสุขมากกับผลลัพธ์ การตกแต่งภายในของ epoxy นั้นดีมากและพลังของมอเตอร์เมื่อเทียบกับขนาดนั้นค่อนข้างดี -
6.Gregoire Langeความร่วมมือระหว่าง Changzhou Vic-Tech Motor Tech และ บริษัท ของเรานั้นยอดเยี่ยมมาก ความเข้าใจที่ดีเกี่ยวกับความต้องการของเรายินดีอย่างยิ่งที่จะแก้ปัญหาของเรา ฉันแนะนำ!
-
David Moleveltการสื่อสารอย่างมืออาชีพและชัดเจน ส่งคำสั่งซื้อในเวลา ตัวเชื่อมต่อตัวนับที่เพิ่มเข้าไปในการจัดส่ง คนขับทำงานเหมือนที่เราตกลงกัน!
-
Buildstorm Private Limitedผลิตภัณฑ์ใช้งานได้ตามที่คาดหวังมันบรรจุอย่างดี ผู้ขายตอบกลับอย่างรวดเร็วและช่วยในการตัดสินใจซื้อ พวกเขาพร้อมที่จะปรับแต่งผลิตภัณฑ์สำหรับคุณ
-
แอชลีย์กริฟฟินการจัดส่งได้รับอย่างรวดเร็วมาก สินค้าได้รับการคุ้มครองอย่างดีจากบรรจุภัณฑ์ บริษัท ตัวแทนเป็นมิตรและใจดี คะแนนเพิ่ม!
ควบคุมด้วยตนเอง 3-12 V DC ไบโพลาร์สเต็ปเปอร์มอเตอร์ไดรเวอร์ CCYH-PM45FH






| สถานที่กำเนิด | มณฑลเจียงซู ประเทศจีน (แผ่นดินใหญ่) |
|---|---|
| ชื่อแบรนด์ | VIC-TECH |
| ได้รับการรับรอง | RoHS |
| หมายเลขรุ่น | CCYH-PM45FH |
| จำนวนสั่งซื้อขั้นต่ำ | 1 ยูนิต |
| ราคา | $14~28/unit |
| รายละเอียดการบรรจุ | แพคเกจการส่งออกมาตรฐานหรือสามารถปรับแต่งได้ |
| เวลาการส่งมอบ | 15 วันทำการหลังจากยืนยันการชำระเงิน |
| เงื่อนไขการชำระเงิน | T / T, เวสเทิร์นยูเนี่ยน, MoneyGram, |
| สามารถในการผลิต | 1,000 หน่วยต่อเดือน |
รายละเอียดสินค้า
| ผลิตภัณฑ์ | ไดรเวอร์สเต็ปเปอร์มอเตอร์ | หมายเลขรุ่น | CCYH-PM45FH |
|---|---|---|---|
| หมายเลขเฟส | 2 เฟส (สเต็ปเปอร์มอเตอร์แบบไบโพลาร์) | ตัวเชื่อมต่อที่เหมาะสม | ขั้วต่อระยะพิทช์ 1.25 มม./2.0 มม |
| แรงดันไฟฟ้าในการขับขี่ | กระแสตรง 3~12V | วิธีการควบคุม | สี่ปุ่มควบคุมด้วยตนเอง |
| เน้น | การควบคุมด้วยมือ ไดรเวอร์ขั้นสองขั้ว,ไดรฟอร์มอเตอร์สเตปเปอร์แบบสองขั้วแบบ DC,3-12 วอลต์ไบโพลาร์ไดรเวอร์สเตปเปอร์ |
||
รายละเอียดสินค้า
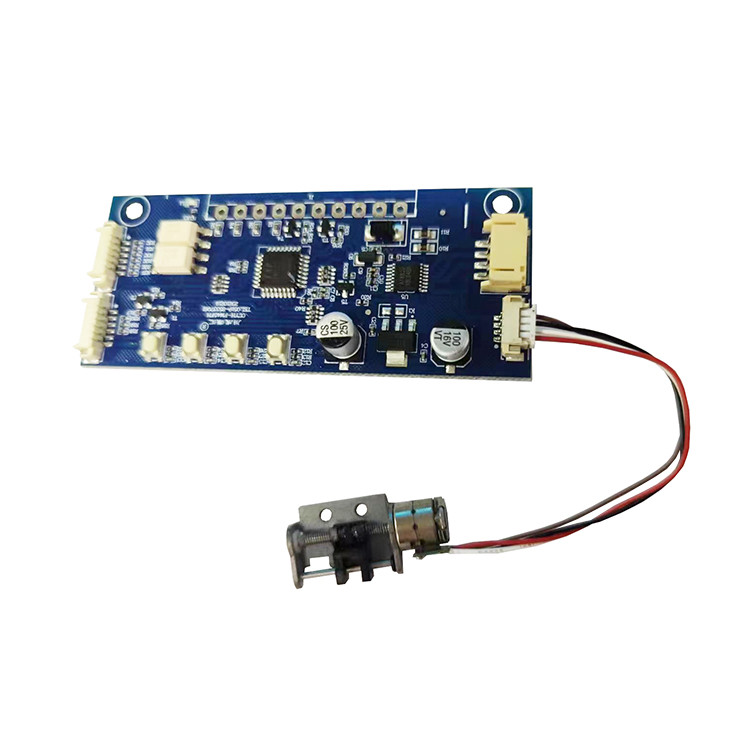
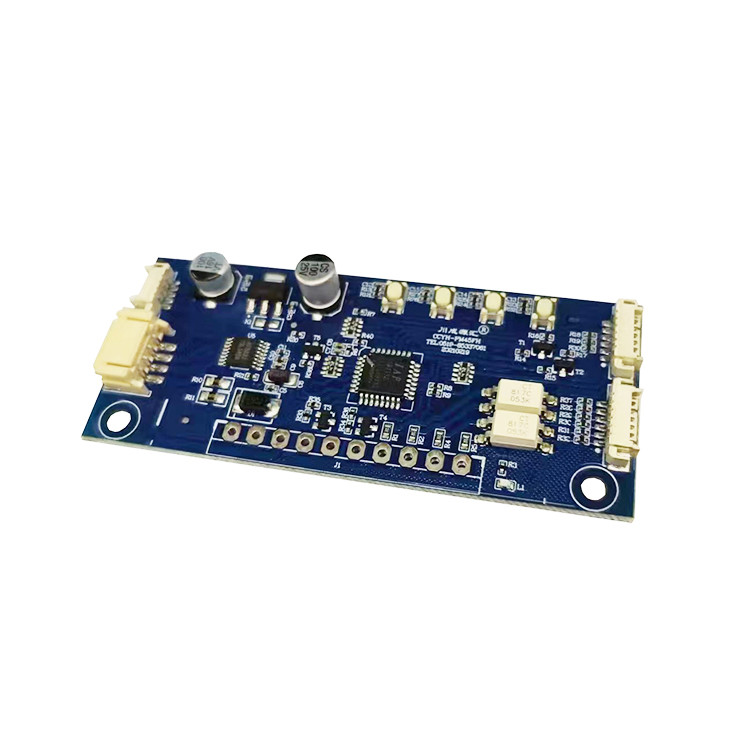
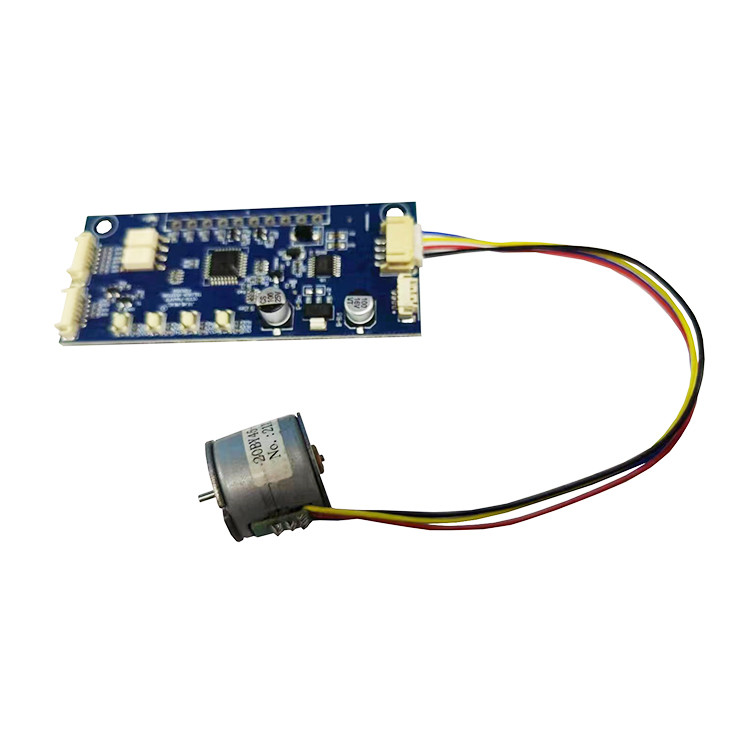
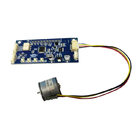
ควบคุมด้วยตนเอง 3-12 V DC ไบโพลาร์สเต็ปเปอร์มอเตอร์ไดรเวอร์ CCYH-PM45FH
ไดรเวอร์สเต็ปเปอร์มอเตอร์ PM45 FH นี้ได้รับการออกแบบมาโดยเฉพาะสำหรับการควบคุมสเต็ปเปอร์มอเตอร์แบบไบโพลาร์ด้วยตนเอง
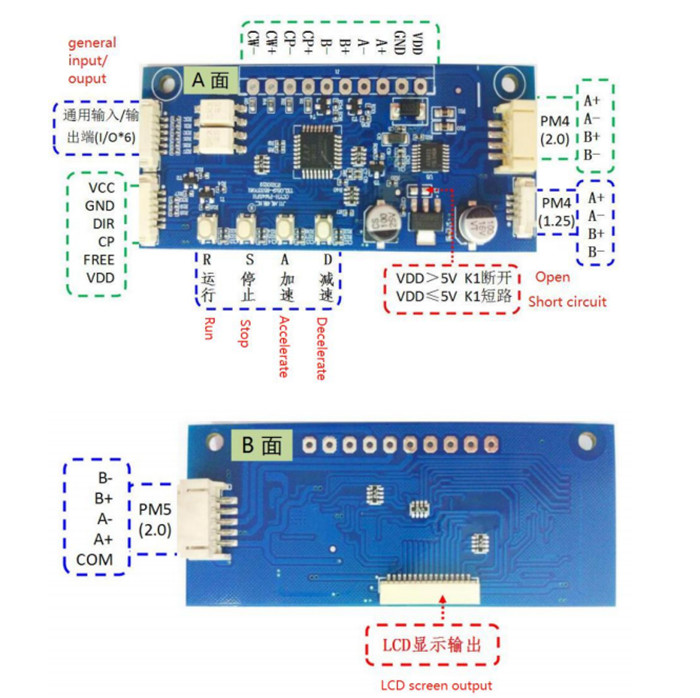
มีคอนเนคเตอร์ที่สามารถใส่ได้ 2 แบบ คือ พิทช์ 1.25 มม. และคอนเนคเตอร์ 2.0 มม.
เมื่อไดรเวอร์เชื่อมต่อกับแหล่งจ่ายไฟ 3~12 V DC (VDD เชื่อมต่อกับขั้วบวกของแหล่งจ่ายไฟ และ GND เชื่อมต่อกับขั้วลบ) จะสามารถขับสเต็ปเปอร์มอเตอร์ปกติได้
มีปุ่มสี่ปุ่มบนแผงคนขับ และผู้ใช้สามารถคลิกการผสมปุ่มต่างๆ เพื่อควบคุมสเต็ปเปอร์มอเตอร์ตามคำสั่งที่ต้องการ
สี่ปุ่ม:
(R: วิ่ง S: หยุด A: การเร่งความเร็ว D: การชะลอตัว )
การรวมปุ่ม:
| ตัวเลข | การรวมปุ่ม | คำอธิบายฟังก์ชัน |
| 1 | เอ = เปิด | เมื่อมอเตอร์หยุดนิ่ง ให้กดแป้นคันเร่ง และมอเตอร์จะเริ่มวิ่งไปข้างหน้าด้วยตนเอง |
| 2 | A+R= เปิด | เมื่อมอเตอร์หยุดนิ่ง ให้กดปุ่มเร่ง + วิ่ง จากนั้นมอเตอร์จะเริ่มเร่งความเร็วไปข้างหน้าด้วยตนเอง |
| 3 | A+S = เปิด | เมื่อมอเตอร์หยุดนิ่ง ให้กดปุ่มเร่งความเร็ว + หยุด และมอเตอร์จะเริ่มดำเนินการลดความเร็วเดินหน้าแบบแมนนวล |
| 4 | D = เปิด | เมื่อมอเตอร์หยุดนิ่ง แป้นลดความเร็วจะถูกกด และมอเตอร์จะเริ่มทำงานในทิศทางตรงกันข้ามด้วยตนเอง |
| 5 | D+R= เปิด | เมื่อมอเตอร์หยุดนิ่ง กดปุ่มลดความเร็ว + วิ่ง และมอเตอร์จะเริ่มดำเนินการเร่งความเร็วย้อนกลับแบบแมนนวล |
| 6 | D+S = เปิด | เมื่อมอเตอร์หยุดนิ่ง ให้กดปุ่มลดความเร็ว + หยุด จากนั้นมอเตอร์จะเริ่มดำเนินการลดความเร็วย้อนกลับแบบแมนนวล |
| 7 | R = เปิด | เมื่อมอเตอร์หยุดนิ่ง กดปุ่มทำงาน มอเตอร์จะเริ่มทำงานโดยอัตโนมัติ |
| 8 | เอ = เปิด | เมื่อมอเตอร์ทำงานโดยอัตโนมัติ ให้กดแป้นคันเร่ง และมอเตอร์จะเริ่มเร่งความเร็ว |
| 9 | D = เปิด | เมื่อมอเตอร์ทำงานโดยอัตโนมัติ เมื่อกดปุ่มลดความเร็ว มอเตอร์จะเริ่มลดความเร็ว |
| 10 | R+A= เปิด | เมื่อมอเตอร์ทำงานโดยอัตโนมัติ ให้กดแป้น run+คันเร่ง และมอเตอร์จะเริ่มทำงานโดยอัตโนมัติในทิศทางไปข้างหน้า |
| 11 | R+D= เปิด | เมื่อมอเตอร์ทำงานโดยอัตโนมัติ กดปุ่ม run + slow down และมอเตอร์จะเริ่มทำงานโดยอัตโนมัติในทิศทางย้อนกลับ |
| 12 | S+A(S+D) = เปิด | เมื่อมอเตอร์หยุดนิ่ง ให้กดปุ่มหยุด+เร่งความเร็ว (หรือหยุด+ลดความเร็ว) จากนั้นมอเตอร์จะเริ่มตั้งระยะการทำงานของรอบอัตโนมัติด้วยตนเอง |
| 13 | S+R= เปิด | เมื่อมอเตอร์หยุดนิ่ง ให้กดปุ่มหยุด + วิ่ง และมอเตอร์จะตอบสนองโดยอัตโนมัติตามระยะทางที่ตั้งค่าด้วยตนเอง |
| 14 | เอ=เปิด | เมื่อมอเตอร์ทำงานเป็นวงจรลูกสูบ ให้กดปุ่มคันเร่ง และมอเตอร์จะเร่งความเร็วเป็นวงจรลูกสูบ |
| 15 | D=เปิด | เมื่อมอเตอร์ทำงานในวงจรลูกสูบ ให้กดปุ่มลดความเร็ว และมอเตอร์จะลดความเร็วในวงจรลูกสูบ |
| 16 | R+A= เปิด | เมื่อมอเตอร์ทำงานแบบลูกสูบกลับ ให้กดแป้น run+คันเร่ง และมอเตอร์จะหมุนกลับในทิศทางไปข้างหน้า |
| 17 | R+D= เปิด | เมื่อมอเตอร์ทำงานแบบลูกสูบกลับ ให้กดปุ่ม run + deceleration มอเตอร์จะหมุนกลับและวิ่งในทิศทางกลับกัน |
| 18 | ส = เปิด | เมื่อมอเตอร์ทำงาน ให้กดปุ่มหยุดเพื่อหยุดมอเตอร์ |
| ข้อสังเกต | ปุ่มผสมให้กดตามลำดับที่กำหนดจากนั้นจะสามารถเข้าถึงฟังก์ชันได้ | |
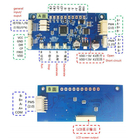
ออกแบบ:
![]()
การใช้งานทั่วไป
-
ควบคุมสเต็ปเปอร์มอเตอร์แบบไบโพลาร์ด้วยตนเอง
การนำเสนอรายละเอียดผลิตภัณฑ์
![]()
![]()
คำถามที่พบบ่อยเกี่ยวกับไดร์เวอร์ คำตอบของผู้ใช้ (ถาม-ตอบ)
(1) สเต็ปเปอร์มอเตอร์และสเต็ปเปอร์ไดรฟ์คืออะไร
สเต็ปเปอร์มอเตอร์เป็นมอเตอร์พิเศษที่ออกแบบมาเป็นพิเศษเพื่อการควบคุมความเร็วและตำแหน่งที่แม่นยำการหมุนของมันทำงานทีละขั้นในมุมคงที่ (เรียกว่า "มุมขั้น") ดังนั้นจึงเรียกว่าสเต็ปเปอร์มอเตอร์ลักษณะเฉพาะคือไม่มีข้อผิดพลาดสะสม รับสัญญาณพัลส์ทุกตัวที่ส่งจากคอนโทรลเลอร์ และมอเตอร์ทำงานที่มุมคงที่ภายใต้ไดรฟ์ของไดรเวอร์ ดังนั้นจึงใช้กันอย่างแพร่หลายในการควบคุมวงเปิดต่างๆ
สเต็ปปิ้งไดรเวอร์เป็นเพาเวอร์แอมป์ที่สามารถสั่งงานสเต็ปปิ้งมอเตอร์ได้สามารถแปลงสัญญาณพัลส์ที่ส่งมาจากคอนโทรลเลอร์เป็นสัญญาณกำลังของสเต็ปปิ้งมอเตอร์ความเร็วของมอเตอร์เป็นสัดส่วนกับความถี่พัลส์ ดังนั้นความถี่พัลส์ควบคุมจึงสามารถปรับได้อย่างแม่นยำความเร็ว จำนวนพัลส์ควบคุมสามารถกำหนดตำแหน่งได้อย่างแม่นยำ
(2) ความล้มเหลวของไดรฟ์คืออะไร?
สเต็ปเปอร์มอเตอร์ถูกกำหนดโดยโครงสร้างเฉพาะของมันเอง และมีการระบุ “มุมสเต็ปโดยกำเนิดของมอเตอร์” (เช่น 1.2°/0.6°) ที่โรงงานอย่างไรก็ตาม ในการควบคุมความแม่นยำหลายครั้ง มุมของขั้นตอนทั้งหมดมีขนาดใหญ่เกินไป ส่งผลต่อความแม่นยำในการควบคุม และ
การสั่นสะเทือนมีขนาดใหญ่เกินไปดังนั้นจึงจำเป็นต้องทำมุมขั้นตอนโดยธรรมชาติของมอเตอร์ในหลายขั้นตอนสิ่งนี้เรียกว่าไดรฟ์ย่อยและสามารถใช้งานฟังก์ชันนี้ได้อุปกรณ์อิเล็กทรอนิกส์เรียกว่าไดรเวอร์ย่อย
(3) ข้อดีของโปรแกรมควบคุมแผนกย่อยคืออะไร?
เนื่องจากมุมสเต็ปที่ผ่านแต่ละสเต็ปลดลง ความสม่ำเสมอของสเต็ปจึงดีขึ้น จึงสามารถปรับปรุงความแม่นยำในการควบคุมได้
การสั่นสะเทือนของมอเตอร์ลดลงได้มากการสั่นความถี่ต่ำเป็นลักษณะเฉพาะของสเต็ปเปอร์มอเตอร์การแบ่งเป็นวิธีที่ดีที่สุดในการกำจัดมัน
สามารถลดแรงกระเพื่อมของแรงบิดและเพิ่มแรงบิดเอาต์พุตได้อย่างมีประสิทธิภาพ
โดยทั่วไปแล้วข้อดีเหล่านี้ได้รับการยอมรับจากผู้ใช้และก่อให้เกิดประโยชน์ ดังนั้นขอแนะนำให้คุณใช้ไดรเวอร์แยกย่อย
(4) เหตุใดมอเตอร์ของฉันจึงทำงานในทิศทางเดียวเท่านั้น
- สัญญาณทิศทางที่เป็นไปได้อ่อนเกินไป หรือขั้วสายไฟผิด หรือแรงดันสัญญาณสูงเกินไปที่จะทำให้ตัวต้านทานจำกัดทิศทางกระแสไฟดับ
-
โหมดพัลส์ไม่ตรงกัน สัญญาณเป็นพัลส์/ทิศทาง ต้องตั้งค่าไดรเวอร์เป็นโหมดนี้หากสัญญาณเป็น CW/CCW (โหมดพัลส์คู่) คนขับจะต้องอยู่ในโหมดนี้ด้วย มิฉะนั้น มอเตอร์จะทำงานในทิศทางเดียวเท่านั้น
แนะนำผลิตภัณฑ์