






















ผลิตภัณฑ์ทั้งหมด
-
ไมโครสเต็ปเปอร์มอเตอร์
-
มอเตอร์สเต็ปเปอร์แม่เหล็กถาวร
-
มอเตอร์สเต็ปเปอร์
-
Linear Stepper เครื่องยนต์
-
มอเตอร์สไลเดอร์
-
มอเตอร์ไฮบริดสเต็ป
-
มอเตอร์เกียร์ DC ขนาดเล็ก
-
ROV Thruster เครื่องยนต์s
-
Gearเครื่องยนต์ โลหะขนาดเล็ก
-
กล่องเกียร์ขนาดเล็ก
-
การควบคุมตำแหน่งสเต็ปเปอร์มอเตอร์
-
เครื่องพิมพ์ 3D Stepper เครื่องยนต์
-
Stepper ขับมอเตอร์
-
ตัวควบคุมมอเตอร์กระแสตรง
-
สกรูและน็อต
-
 แอนเดรสบลังโกทรัสเตอร์มาถึงอย่างถูกต้องแล้ว ฉันทดสอบพวกเขาใน ROV และเรามีความสุขมากกับผลลัพธ์ การตกแต่งภายในของ epoxy นั้นดีมากและพลังของมอเตอร์เมื่อเทียบกับขนาดนั้นค่อนข้างดี
แอนเดรสบลังโกทรัสเตอร์มาถึงอย่างถูกต้องแล้ว ฉันทดสอบพวกเขาใน ROV และเรามีความสุขมากกับผลลัพธ์ การตกแต่งภายในของ epoxy นั้นดีมากและพลังของมอเตอร์เมื่อเทียบกับขนาดนั้นค่อนข้างดี -
6.Gregoire Langeความร่วมมือระหว่าง Changzhou Vic-Tech Motor Tech และ บริษัท ของเรานั้นยอดเยี่ยมมาก ความเข้าใจที่ดีเกี่ยวกับความต้องการของเรายินดีอย่างยิ่งที่จะแก้ปัญหาของเรา ฉันแนะนำ!
-
David Moleveltการสื่อสารอย่างมืออาชีพและชัดเจน ส่งคำสั่งซื้อในเวลา ตัวเชื่อมต่อตัวนับที่เพิ่มเข้าไปในการจัดส่ง คนขับทำงานเหมือนที่เราตกลงกัน!
-
Buildstorm Private Limitedผลิตภัณฑ์ใช้งานได้ตามที่คาดหวังมันบรรจุอย่างดี ผู้ขายตอบกลับอย่างรวดเร็วและช่วยในการตัดสินใจซื้อ พวกเขาพร้อมที่จะปรับแต่งผลิตภัณฑ์สำหรับคุณ
-
แอชลีย์กริฟฟินการจัดส่งได้รับอย่างรวดเร็วมาก สินค้าได้รับการคุ้มครองอย่างดีจากบรรจุภัณฑ์ บริษัท ตัวแทนเป็นมิตรและใจดี คะแนนเพิ่ม!
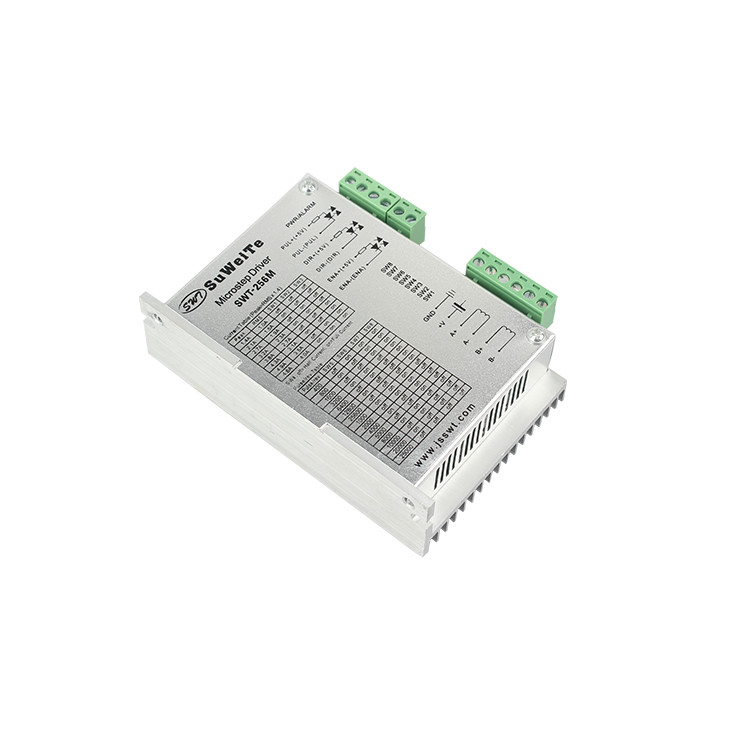
Microstepping Stepper เครื่องยนต์ Driver สำหรับมอเตอร์ไฮบริดที่มีหลายส่วน SWT-256M









| สถานที่กำเนิด | มณฑลเจียงซู จีน |
|---|---|
| ชื่อแบรนด์ | VIC-TECH |
| ได้รับการรับรอง | RoHS |
| หมายเลขรุ่น | SWT-256M |
| จำนวนสั่งซื้อขั้นต่ำ | 1 หน่วย |
| ราคา | $20~30/unit |
| รายละเอียดการบรรจุ | แพคเกจการส่งออกมาตรฐานหรือสามารถกำหนดเองได้ |
| เวลาการส่งมอบ | 15 วันทำงานหลังจากยืนยันการชำระเงิน |
| เงื่อนไขการชำระเงิน | MoneyGram T/T ตะวันตกสหภาพ |
| สามารถในการผลิต | หน่วย 10000 ต่อเดือน |
รายละเอียดสินค้า
| ประเภทมอเตอร์ | มอเตอร์สเต็ป | แรงดันไฟฟ้า | 423 |
|---|---|---|---|
| น้ำหนัก | 250 กรัม | ||
| เน้น | ไดรฟ์มอเตอร์สองขั้ว,2 เฟส stepper ขับมอเตอร์ |
||
รายละเอียดสินค้า
ไดรเวอร์มอเตอร์ไมโครสเต็ป SWT-256M สำหรับมอเตอร์แม่เหล็กถาวรและมอเตอร์ไฮบริด
SWT-256M เป็นไดร์เวอร์สเต็ปเปอร์มอเตอร์ประสิทธิภาพสูงที่ได้รับการออกแบบโดยโรงงานของเราโดยใช้เทคโนโลยีการควบคุมกระแสที่มีความแม่นยำสูงแบบไซน์ เทคโนโลยีการควบคุมกระแสที่แม่นยำของซายน์แบบบริสุทธิ์ที่ใช้โดย SWT-256M สามารถปรับปรุงปัญหาข้างต้นได้ดีดังนั้นผลการทำงานของสเต็ปปิ้งมอเตอร์จึงใกล้เคียงกับระดับเซอร์โวในระดับหนึ่ง
ไดรฟ์นี้ยังมีหลายส่วนย่อยขนาดเล็กการปกป้องหลายและฟังก์ชั่นกึ่งอัตโนมัติ ผู้ใช้สามารถใช้แรงดัน SWT-256M สูงถึง 40VDC

มิติเชิงกล: MM

ประการที่สองคำแนะนำการเดินสายไฟ
1. คำอธิบายสัญญาณสายไฟอ่อน P1
ฟังก์ชั่นสัญญาณ
PUL + (+ 5V) สัญญาณพัลส์: สัญญาณควบคุมพัลส์, ขอบที่เพิ่มขึ้นของพัลส์จะใช้ได้ในขณะนี้; P-5 คือ 4-5V ที่ระดับสูงและ 0-0.5V ที่ระดับต่ำเพื่อการตอบสนองที่เชื่อถือได้ความกว้างของพัลส์มากกว่า1μS หากใช้ + 12V หรือ + 24V จะต้องมีการ จำกัด กระแสตัวต้านทานสตริง
PUL- (PUL)
สัญญาณทิศทาง DIR + (+ 5V): สัญญาณระดับสูง / ต่ำเพื่อให้แน่ใจว่าการตอบสนองของมอเตอร์ที่เชื่อถือได้สอดคล้องกับไปข้างหน้าและย้อนกลับของมอเตอร์ สัญญาณทิศทางควรกำหนดอย่างน้อย5μsก่อนสัญญาณพัลส์ ทิศทางการวิ่งเริ่มต้นของมอเตอร์นั้นสัมพันธ์กับการเดินสายไฟของมอเตอร์ การเปลี่ยนขดลวดเฟสใด ๆ (เช่น A +, A-exchange) สามารถเปลี่ยนทิศทางของการเริ่มต้นการทำงานของมอเตอร์ เมื่อ DIR-high level 4 -5V, 0-0.5V ที่ระดับต่ำ
DIR- (DIR)
สัญญาณเปิดใช้งาน ENA + (+ 5V): สัญญาณอินพุตนี้ใช้สำหรับเปิด / ปิดการใช้งานการเปิดใช้งานระดับสูงและไดรเวอร์ไม่ทำงานเมื่อระดับต่ำ ภายใต้สถานการณ์ปกติคุณจะต้องไม่เชื่อมต่อเพื่อให้มันถูกระงับและเปิดใช้งานโดยอัตโนมัติ
ENA- (ENA)
2. P2 คำอธิบายอินเตอร์เฟสที่แข็งแกร่ง
ฟังก์ชั่นอินเตอร์เฟซ
แหล่งจ่ายไฟ GND DC
+ V DC power เป็นบวกค่าใด ๆ ระหว่าง + 30V- + 40V สามารถใช้ได้ แต่ค่าที่แนะนำคือ + 36VDC
A +, A- มอเตอร์ A เฟส A +, A-intermodulation สามารถเปลี่ยนทิศทางการทำงานของมอเตอร์
B +, B- มอเตอร์ B เฟส B +, B-intermodulation สามารถเปลี่ยนทิศทางของการทำงานของมอเตอร์
การนำเสนอรายละเอียดสินค้า


การตั้งค่าสวิตช์ปัจจุบันของการจัดสรร
การตั้งค่าปัจจุบันทำงาน (ไดนามิก)
| จุดสูงสุดในปัจจุบัน | SW1 | SW2 | SW3 | |
| 1.4A | ปิด | ปิด | ปิด | |
| 2.1A | บน | ปิด | ปิด | |
| 2.7A | ปิด | บน | ปิด | |
| 3.2A | บน | บน | ปิด | |
| 3.8A | ปิด | ปิด | บน | |
| 4.3A | บน | ปิด | บน | |
| 4.9A | ปิด | บน | บน | |
| 5.6A | บน | บน | บน |
การตั้งค่าการจัดสรร
การแบ่งความถูกต้องถูกตั้งค่าโดยสวิตช์ปุ่มหมุนสี่ตำแหน่ง SW5-SW8
ปัจจัยการจัดสรร | ขั้นตอน / วงกลม (1.8 ° / ขั้นตอนเต็ม) | SW5 | SW6 | SW7 | SW8 |
| 2 | 400 | ปิด | บน | บน | บน |
| 4 | 800 | บน | ปิด | บน | บน |
| 8 | 1600 | ปิด | ปิด | บน | บน |
| 16 | 3200 | บน | บน | ปิด | บน |
| 32 | 6400 | ปิด | บน | ปิด | บน |
| 64 | 12800 | บน | ปิด | ปิด | บน |
| 128 | 25600 | ปิด | ปิด | ปิด | บน |
| 5 | 1000 | บน | บน | บน | ปิด |
| 10 | 2000 | ปิด | บน | บน | ปิด |
| 20 | 4000 | บน | ปิด | บน | ปิด |
| 25 | 5000 | ปิด | ปิด | บน | ปิด |
| 40 | 8000 | บน | บน | ปิด | ปิด |
| 50 | 10000 | ปิด | บน | ปิด | ปิด |
| 100 | 20000 | บน | ปิด | ปิด | ปิด |
| 125 | 25000 | ปิด | ปิด | ปิด | ปิด |
( 1) สเต็ปเปอร์มอเตอร์และไดรฟ์สเต็ปคืออะไร คำถามที่พบบ่อยของไดร์เวอร์คำตอบของผู้ใช้ (Q&A)
มอเตอร์สเต็ปเปอร์เป็นมอเตอร์พิเศษที่ออกแบบมาเป็นพิเศษเพื่อการควบคุมความเร็วและตำแหน่งที่แม่นยำ การหมุนจะดำเนินการทีละขั้นที่มุมคงที่ (เรียกว่า "มุมขั้นตอน") ดังนั้นจึงเรียกว่าสเต็ปเปอร์มอเตอร์ ลักษณะของมันคือไม่มีข้อผิดพลาดสะสมทุกสัญญาณพัลส์ที่ส่งจากคอนโทรลเลอร์จะได้รับและมอเตอร์จะทำงานที่มุมคงที่ภายใต้ไดรฟ์ของไดรเวอร์ดังนั้นจึงมีการใช้กันอย่างแพร่หลายในการควบคุมวงเปิดต่างๆ
ไดรฟเวอร์สเต็ปปิ้งเป็นเพาเวอร์แอมป์ที่สามารถใช้งานสเต็ปปิ้งมอเตอร์ได้ มันสามารถแปลงสัญญาณพัลส์ที่ส่งมาจากคอนโทรลเลอร์เป็นสัญญาณไฟของสเต็ปปิ้งมอเตอร์ ความเร็วของมอเตอร์นั้นแปรผันตามความถี่พัลส์ดังนั้นจึงสามารถปรับความถี่พัลส์ควบคุมได้อย่างแม่นยำ ความเร็วสามารถควบคุมจำนวนพัลส์ได้อย่างแม่นยำ
(2) การแยกส่วนของไดรฟ์คืออะไร?
มอเตอร์สเต็ปปิ้งจะถูกกำหนดโดยโครงสร้างที่เป็นเอกลักษณ์ของตัวเองและ "มุมขั้นตอนโดยธรรมชาติของมอเตอร์" (เช่น 1.2 ° / 0.6 °) จะแสดงที่โรงงาน อย่างไรก็ตามในการควบคุมความแม่นยำและโอกาสต่าง ๆ มุมของขั้นตอนทั้งหมดนั้นใหญ่เกินไปส่งผลกระทบต่อความแม่นยำในการควบคุมและ
การสั่นสะเทือนมีขนาดใหญ่เกินไป ดังนั้นจึงจำเป็นต้องดำเนินการตามขั้นตอนโดยธรรมชาติของมอเตอร์ในหลายขั้นตอน สิ่งนี้เรียกว่าไดรฟ์ส่วนย่อยและสามารถรับรู้ฟังก์ชันนี้ได้ อุปกรณ์อิเล็กทรอนิกส์เรียกว่าไดร์เวอร์แผนก
(3) อะไรคือข้อดีของไดรเวอร์การแบ่งย่อย?
เนื่องจากมุมของขั้นตอนที่ผ่านแต่ละขั้นตอนลดลงความสม่ำเสมอขั้นตอนจึงได้รับการปรับปรุงดังนั้นความแม่นยำในการควบคุมจึงสามารถปรับปรุงได้
การสั่นสะเทือนของมอเตอร์สามารถลดลงอย่างมาก การสั่นความถี่ต่ำเป็นลักษณะเฉพาะของสเต็ปเปอร์มอเตอร์ การแบ่งเป็นวิธีที่ดีที่สุดในการกำจัดมัน
มันสามารถลดระลอกแรงบิดและเพิ่มแรงบิดเอาต์พุตได้อย่างมีประสิทธิภาพ
ข้อดีเหล่านี้มักได้รับการยอมรับจากผู้ใช้และนำมาใช้ให้เกิดประโยชน์ดังนั้นจึงแนะนำให้คุณใช้ไดร์เวอร์แผนก
(4) เหตุใดมอเตอร์ของฉันจึงทำงานในทิศทางเดียวเท่านั้น
- สัญญาณทิศทางที่เป็นไปได้นั้นอ่อนเกินไปหรือขั้วสายไฟผิดหรือแรงดันสัญญาณสูงเกินไปที่จะเผาผลาญตัวต้านทาน จำกัด กระแสทิศทาง
โหมดพัลส์ไม่ตรงกันสัญญาณคือพัลส์ / ทิศทางต้องตั้งค่าไดรเวอร์ไว้ที่โหมดนี้ หากสัญญาณเป็น CW / CCW (โหมดพัลส์คู่) ผู้ขับขี่จะต้องอยู่ในโหมดนี้ไม่เช่นนั้นมอเตอร์จะทำงานในทิศทางเดียวเท่านั้น
แนะนำผลิตภัณฑ์