






















ผลิตภัณฑ์ทั้งหมด
-
ไมโครสเต็ปเปอร์มอเตอร์
-
มอเตอร์สเต็ปเปอร์แม่เหล็กถาวร
-
มอเตอร์สเต็ปเปอร์
-
Linear Stepper เครื่องยนต์
-
มอเตอร์สไลเดอร์
-
มอเตอร์ไฮบริดสเต็ป
-
มอเตอร์เกียร์ DC ขนาดเล็ก
-
ROV Thruster เครื่องยนต์s
-
Gearเครื่องยนต์ โลหะขนาดเล็ก
-
กล่องเกียร์ขนาดเล็ก
-
การควบคุมตำแหน่งสเต็ปเปอร์มอเตอร์
-
เครื่องพิมพ์ 3D Stepper เครื่องยนต์
-
Stepper ขับมอเตอร์
-
ตัวควบคุมมอเตอร์กระแสตรง
-
สกรูและน็อต
-
 แอนเดรสบลังโกทรัสเตอร์มาถึงอย่างถูกต้องแล้ว ฉันทดสอบพวกเขาใน ROV และเรามีความสุขมากกับผลลัพธ์ การตกแต่งภายในของ epoxy นั้นดีมากและพลังของมอเตอร์เมื่อเทียบกับขนาดนั้นค่อนข้างดี
แอนเดรสบลังโกทรัสเตอร์มาถึงอย่างถูกต้องแล้ว ฉันทดสอบพวกเขาใน ROV และเรามีความสุขมากกับผลลัพธ์ การตกแต่งภายในของ epoxy นั้นดีมากและพลังของมอเตอร์เมื่อเทียบกับขนาดนั้นค่อนข้างดี -
6.Gregoire Langeความร่วมมือระหว่าง Changzhou Vic-Tech Motor Tech และ บริษัท ของเรานั้นยอดเยี่ยมมาก ความเข้าใจที่ดีเกี่ยวกับความต้องการของเรายินดีอย่างยิ่งที่จะแก้ปัญหาของเรา ฉันแนะนำ!
-
David Moleveltการสื่อสารอย่างมืออาชีพและชัดเจน ส่งคำสั่งซื้อในเวลา ตัวเชื่อมต่อตัวนับที่เพิ่มเข้าไปในการจัดส่ง คนขับทำงานเหมือนที่เราตกลงกัน!
-
Buildstorm Private Limitedผลิตภัณฑ์ใช้งานได้ตามที่คาดหวังมันบรรจุอย่างดี ผู้ขายตอบกลับอย่างรวดเร็วและช่วยในการตัดสินใจซื้อ พวกเขาพร้อมที่จะปรับแต่งผลิตภัณฑ์สำหรับคุณ
-
แอชลีย์กริฟฟินการจัดส่งได้รับอย่างรวดเร็วมาก สินค้าได้รับการคุ้มครองอย่างดีจากบรรจุภัณฑ์ บริษัท ตัวแทนเป็นมิตรและใจดี คะแนนเพิ่ม!
NEMA34 86 มิลลิเมตร ไฮบริดสายการขับเคลื่อน stepper มอเตอร์ภายนอกแรงผลักดันสูง











| สถานที่กำเนิด | จีน |
|---|---|
| ชื่อแบรนด์ | VIC-TECH |
| ได้รับการรับรอง | RoHS |
| หมายเลขรุ่น | SM86C0905 |
| จำนวนสั่งซื้อขั้นต่ำ | 1 หน่วย |
| ราคา | $160~$120/Unit |
| รายละเอียดการบรรจุ | ผลิตภัณฑ์ถูกบรรจุด้วยผ้าหอมเพชร และด้านนอกอยู่ในกล่องกล่อง |
| เวลาการส่งมอบ | 10 ~ 30 วันหลังจากได้รับการชําระเงินตัวอย่าง |
| เงื่อนไขการชำระเงิน | MoneyGram, Western Union, บัตรเครดิต, T/T, L/C |
| สามารถในการผลิต | 100000\ หน่วย/ปี |
รายละเอียดสินค้า
| ประเภทมอเตอร์ | ไฮบริดสเต็ปเปอร์มอเตอร์ | จำนวนเฟส | 2 เฟส (ไบโพลาร์) |
|---|---|---|---|
| มุมก้าว | 1.8 องศา/ขั้นตอน | ชนิดลีดสกรู | Tr15.875*P3.175*4N |
| ความต้านทานของคอยล์ | 1.6Ω±10% | ความดันเฉพาะ | 5โวลต์ดีซี |
| จัดอันดับปัจจุบัน | 3.12A/เฟส | ||
| เน้น | 86 มิลลิเมตร ไฮบริดเส้นทาง stepper มอเตอร์,NEMA34 ไฮบริดสายการเคลื่อนไหว stepper,เครื่องยนต์สเตปเปอร์เส้นแรงผลักดันสูง |
||
รายละเอียดสินค้า
คําอธิบาย
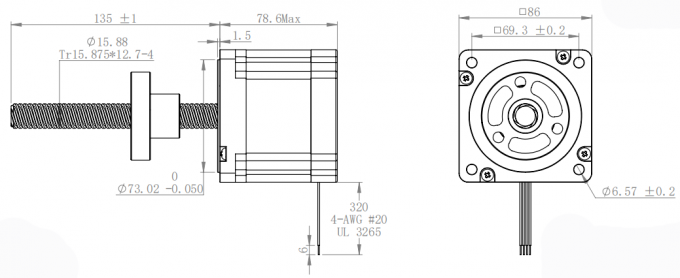
NEMA 34 ไฮบริดสเตปเปอร์ มอเตอร์มีขนาด 86 มม.
มันยังเป็นมอเตอร์สเตปเปอร์แบบเส้นทางขับขี่ภายนอกที่มีแกนสกรูหลอดความยาว 135 มิลลิเมตรบนด้านบน, ยังมีพลาสติกเน็ต / slide ที่เข้ากับมัน
สกรูนํารุ่นหมายเลขคือ: Tr15.875*P3.175*4N
ความสว่างของสกรูนําคือ 3.17 มิลลิเมตร, และมันมี 4 การเริ่มต้น, ดังนั้นนํา = จํานวนการเริ่มต้น * สกรูนํา pitch = 4 * 3.175 มิลลิเมตร = 12.7 มิลลิเมตร
ดังนั้นความยาวของขั้นตอนของมอเตอร์คือ: 12.7mm/200steps=0.0635mm/step
เรายังมีชนิดสกรูนําอื่น ๆ สําหรับตัวเลือก, มันขึ้นอยู่กับความต้องการของลูกค้าเกี่ยวกับแรงผลักและความเร็วเชิงเส้นของมอเตอร์.

ปริมาตร
| รุ่นหมายเลข | SM86C0905 |
| กว้างของมอเตอร์ | 86 มิลลิเมตร (NEMA34) |
| ความดันการขับเคลื่อน | 5V DC |
| ความต้านทานของโค้ล | 1.6Ω±10%/เฟส |
| จํานวนระยะ | 2 ขั้นตอน(โรคสะเก็ดเงิน) |
| มุมก้าว | 1.8°/step |
| ปัจจุบัน | 3.12A/เฟส |
| ขั้นต่ําแรงผลัก (300PPS) | 50 กิโลกรัม |
| ความยาวของขั้นตอน | 0.0635 มิลลิเมตร/ขั้นตอน |
ปริมาตรของสกรูนํา
| ประเภทสกรูหลอด | สกรูตราเปซ |
| สกรูนํารุ่นที่ | Tr15.875*P3.175*4N |
| กว้างภายนอก | 15..875 มิลลิเมตร |
| โลหะ | 12.7 มิลลิเมตร |
| เริ่มต้น | 4 |
| ปิช | 3.175 มม. |
| ความยาวของขั้นตอน | 0.0635 มิลลิเมตร/ขั้นตอน |
การออกแบบ
เกี่ยวกับสกรูนํา
สกรูนําที่ใช้ในมอเตอร์ stepper ไฮบริดเส้นตรงโดยทั่วไปเป็นสกรูนําแบบ trapezoidal
ตัวอย่างเช่นสําหรับ Tr3.5*P0.3*1N สกรูนํา
Tr หมายถึงชนิดสกรูนําแบบตราเปซ
P0.3 หมายถึงความยาวของสกรูนํา 0.3mm
1N หมายถึงมันคือ single start lead screw
สกรูหลอดหลอด = เลขเริ่มต้น * pitch
ดังนั้นสําหรับสกรูเชือกเฉพาะนี้ มันคือ 0.3 มิลลิเมตร
มอเตอร์ของมอเตอร์ stepper ของมอเตอร์ stepper ไฮบริด 1.8 องศา / ขั้นตอน ซึ่งใช้เวลา 200 ขั้นตอนในการหมุนหนึ่งรอบ
ความยาวของขั้นตอนคือการเคลื่อนไหวแบบเส้นตรง ที่มอเตอร์ทํา เมื่อมันทําขั้นตอนเดียว
สําหรับสกรูนํา 0.3 มิลลิเมตร ความยาวของขั้นตอนคือ 0.3 มิลลิเมตร / 200 ขั้นตอน = 0.0015 มม / ขั้นตอน
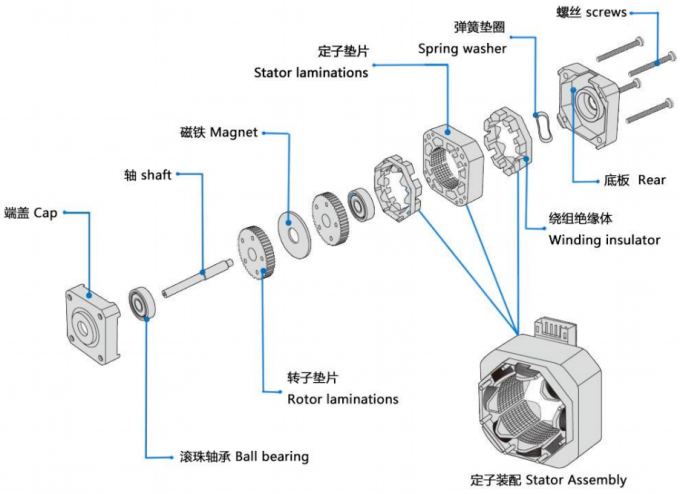
โครงสร้างพื้นฐานของมอเตอร์ NEMA
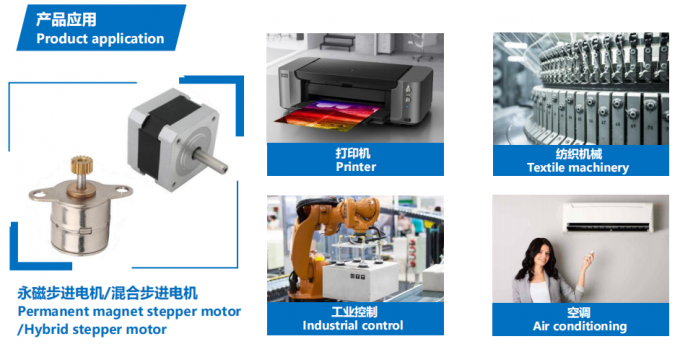
การใช้งานของเครื่องยนต์ Hybrid stepper
เนื่องจากความละเอียดสูงของมอเตอร์สเตปเปอร์ไฮบริด ( 200 หรือ 400 ขั้นตอนต่อรอบ) พวกเขาถูกใช้อย่างแพร่หลายสําหรับการใช้งานที่ต้องการความแม่นยําสูง เช่น:
การพิมพ์ 3 มิติ
การควบคุมอุตสาหกรรม ((CNC, เครื่องบดอัตโนมัติ, เครื่องจักรทอ)
อุปกรณ์นอกของคอมพิวเตอร์
เครื่องบรรจุ
และระบบอัตโนมัติอื่นๆ ที่ต้องการการควบคุมความแม่นยําสูง
ลูกค้าควรปฏิบัติตามหลักการที่ว่า ครับ เลือกมอเตอร์สเตปเปอร์ก่อน แล้วเลือกไดรเวอร์จากมอเตอร์สเตปเปอร์ที่มีอยู่
ดีที่สุดคือไม่ควรใช้โหมดขับขี่เต็มขั้นตอน ในการขับขี่มอเตอร์ขั้นตอนแบบไฮบริด และการสั่นสะเทือนจะใหญ่กว่าในขณะขับขี่เต็มขั้นตอน
มอเตอร์สเตปเปอร์ไฮบริดเหมาะสมกว่าสําหรับโอกาสความเร็วต่ํา เราแนะนําความเร็วไม่เกิน 1000 รอบ / นาที (6666PPS ที่ 0.9 องศา) โดยควรระหว่าง 1000-3000PPS (0.9 องศา)และมันสามารถติดกับกล่องเกียร์ เพื่อลดความเร็วมอเตอร์มีประสิทธิภาพการทํางานสูงและเสียงต่ําในความถี่ที่เหมาะสม
เนื่องจากเหตุผลทางประวัติศาสตร์, เพียงมอเตอร์ที่มีความดันนาม 12V ใช้ 12V. ความดันนามอื่น ๆ บนภาพออกแบบไม่ใช่ความดันขับเคลื่อนที่เหมาะสมที่สุดสําหรับมอเตอร์.ลูกค้าควรเลือกความเข้มข้นขับเคลื่อนที่เหมาะสมและตัวขับเคลื่อนที่เหมาะสมตามความต้องการของตนเอง.
เมื่อเครื่องยนต์ถูกใช้กับความเร็วสูงหรือภาระที่ใหญ่, มันโดยทั่วไปไม่เริ่มต้นที่ความเร็วการทํางานโดยตรง. เราแนะนําที่จะเพิ่มความถี่และความเร็วค่อยๆ.เครื่องยนต์ไม่เสียขั้นตอนและที่สอง มันสามารถลดความดังและปรับปรุงความแม่นยําในการตั้งตําแหน่งได้
มอเตอร์ไม่ควรทํางานในบริเวณการสั่นสะเทือน ((ต่ํากว่า 600 PPS) หากมันต้องใช้ในความเร็วต่ํา, ปัญหาการสั่นสะเทือนสามารถลดลงโดยการเปลี่ยนแปลงความกระชับกําลัง, ขณะนี้หรือเพิ่มความอ่อนแอบาง.
เมื่อมอเตอร์ทํางานต่ํากว่า 600PPS (0.9 องศา) ควรขับเคลื่อนด้วยกระแสไฟฟ้าขนาดเล็ก, อุปทานขนาดใหญ่และความดันต่ํา
สําหรับภาระที่มีวินาทีความอ่อนแอที่ใหญ่ ควรเลือกมอเตอร์ขนาดใหญ่
เมื่อความละเอียดสูงกว่าต้องการมันสามารถแก้ไขโดยการเพิ่มกล่องเกียร์, เพิ่มความเร็วของมอเตอร์, หรือใช้การขับเคลื่อนส่วนย่อย.แต่ราคาของระบบทั้งหมดค่อนข้างแพงดังนั้นมันจึงไม่ค่อยถูกใช้
ขนาดของมอเตอร์ stepper:
เรามีมอเตอร์สเตปเปอร์ไฮบริดขนาด 20mm ((NEMA8), 28mm ((NEMA11), 35mm ((NEMA14), 42mm ((NEMA17), 57mm ((NEMA23), 86mm ((NEMA34) เราแนะนําให้กําหนดขนาดมอเตอร์ก่อน, แล้วยืนยันปารามิเตอร์อื่น ๆ,เมื่อคุณเลือกมอเตอร์สเตปเปอร์ไฮบริด.
บริการปรับแต่ง
การออกแบบของมอเตอร์สามารถปรับได้ตามความต้องการของลูกค้า รวมถึง:
กว้างของมอเตอร์: เรามีมอเตอร์กว้าง 6mm, 8mm, 10mm, 15mm และ 20mm
ความต้านทานของโค้ล / ความตึงระดับ: ความต้านทานของโค้ลสามารถปรับได้ และด้วยความต้านทานที่สูงขึ้น ความตึงระดับของมอเตอร์จะสูงขึ้น
การออกแบบบราคเก็ต / ความยาวของสกรูนํา: หากลูกค้าต้องการบราคเก็ตให้ยาว / สั้น, ด้วยการออกแบบพิเศษเช่นรูการติดตั้ง, มันสามารถปรับได้
PCB + สายเคเบิล + เครื่องเชื่อม: การออกแบบ PCB, ความยาวของสายเคเบิลและความยาวของสายเชื่อมทั้งหมดสามารถปรับเปลี่ยนได้, สามารถเปลี่ยนเป็น FPC หากลูกค้าต้องการ
ระยะเวลา
ถ้าเรามีตัวอย่างในคลัง เราสามารถส่งตัวอย่างใน 3 วัน
ถ้าเราไม่มีตัวอย่างในคลัง เราจําเป็นต้องผลิตมัน เวลาการผลิตประมาณ 20 วันปฏิทิน
สําหรับการผลิตจํานวนมาก ระยะเวลานําขึ้นอยู่กับปริมาณการสั่งซื้อ
วิธีการชําระเงินและเงื่อนไขการชําระเงิน
สําหรับตัวอย่างโดยทั่วไป เรายอมรับ PayPal หรือ Alibaba
สําหรับการผลิตจํานวนมาก เรายอมรับการชําระเงิน T/T
สําหรับตัวอย่าง เราเก็บเงินเต็มก่อนการผลิต
สําหรับการผลิตจํานวนมาก เราสามารถรับการชําระเงินล่วงหน้า 50% ก่อนการผลิต และเก็บเงินที่เหลือ 50% ก่อนการจัดส่ง
หลังจากเราร่วมมือสั่งซื้อมากกว่า 6 ครั้ง เราสามารถเจรจาเงื่อนไขการชําระเงินอื่น ๆ เช่น A / S (หลังจากที่เห็น)
FAQ
1.เวลาการจัดส่งทั่วไปสําหรับตัวอย่างนานแค่ไหน?
เวลานําในการสั่งตัวอย่างประมาณ 15 วัน เวลานําในการสั่งปริมาณมวล 25-30 วัน
2คุณยอมรับการบริการตามสั่งไหม
เรายอมรับผลิตภัณฑ์ที่กําหนดเอง รวมถึงปริมาตรของมอเตอร์ ประเภทของสายนํา
3มันสามารถเพิ่ม Encoder ให้กับมอเตอร์นี้ได้มั้ย?
สําหรับมอเตอร์ประเภทนี้ เราสามารถเพิ่มเครื่อง Encoder บนหมวกสวมมอเตอร์ได้
คํา ถาม ที่ ถาม บ่อย
1ความแตกต่างระหว่างสายไฟแบบสองขั้วและแบบเดียวของมอเตอร์สเตปเปอร์คืออะไร?
มอเตอร์สเตปเปอร์ที่มีการเชื่อมต่อแบบสองขั้วใช้วิธีการขับเคลื่อนที่กระแสกระแสในทั้งสองทิศทางในหนึ่งการล่อ (การขับเคลื่อนแบบสองขั้ว)
มอเตอร์สเตปเปอร์ที่มีการเชื่อมต่อแบบขั้วเดียวมีเข็มระบายกลางและใช้วิธีการขับเคลื่อนที่กระแสไฟฟ้าไหลไปในทิศทางคงที่เสมอในหนึ่งการล่อ (การขับเคลื่อนขั้วเดียว)
2.เครื่องยนต์ stepper ในโหมดการทํางานเริ่มต้น-หยุดไม่สามารถเริ่มต้นเหตุผลและวิธีการประมวลผล
a.ภาระใหญ่เกินไป: ความผิดพลาดในการเลือกมอเตอร์ เลือกขนาดใหญ่ของมอเตอร์
b.ความถี่สูงเกินไป: ลดความถี่
c.ถ้ามอเตอร์สั่นสั่นไป-กลับ หรือมอเตอร์น้อยมาก แสดงว่ามีความเสียหายในระยะ หรือวงจรหัก: เปลี่ยนหรือซ่อมมอเตอร์
d.ปัจจุบันเฟสไม่เพียงพอ: เพิ่มปัจจุบันเฟส อย่างน้อยสําหรับขั้นตอนแรกของการเริ่มต้น
3สาเหตุและวิธีแก้ปัญหาของมอเตอร์สเตปเปอร์ ที่เร่งเต็ม แต่หยุดหมุนเมื่อมันถึงความเร็วคงที่
สาเหตุ: มอเตอร์ขั้นกําลังทํางานในขั้นต่ําของความจุของมันและหยุดเนื่องจากการเร่งเร่งเกินขั้น รอเตอร์สั่นและทํางานไม่มั่นคง
การแก้ไข
1ลดความเร่ง ย.ก.เลือกความเร่งต่ํากว่า หรือใช้ระดับความเร่งที่แตกต่างกันสองระดับ คือสูงขึ้นตอนเริ่มต้น และต่ําลงเมื่อใกล้ความเร็วสูงสุด
2 เพิ่มทอร์ค
เพิ่มอัดแรงทางเครื่องจักรกลไปยังแกนหลัง แต่นี้เพิ่มความอ่อนแอของหมุน
4ทําการขับรถส่วนย่อย
แนะนำผลิตภัณฑ์